Opis prezentacije po pojedinačnim slajdovima:
1 slajd
Opis slajda:
Definisati posao? Koje slovo predstavlja? U kojim jedinicama se mjeri? Pod kojim uslovima je rad sile pozitivan? negativan? jednako nuli? Koje sile se nazivaju potencijalnim? Dajte primjere? Koliki je rad koji vrši gravitacija? Sila elastičnosti? Definišite moć. U kojim jedinicama se mjeri snaga? ZADACI ZA USMENI ANKETA:
2 slajd

Opis slajda:
ZADACI ZA PONAVLJANJE NAUČENOG MATERIJALA: 1. Automobil mase 1000 kg, koji se ravnomjerno ubrzano kreće iz stanja mirovanja, kreće se 200 m za 10 s. Odrediti rad vučne sile ako je koeficijent trenja 0,05. Odgovor: 900 kJ 2. Prilikom oranja traktor savladava silu otpora od 8 kN, razvijajući snagu od 40 kW. Kojom brzinom se kreće traktor? Odgovor: 5 m/s 3. Telo se kreće duž ose OX pod dejstvom sile, zavisnost njegove projekcije od koordinata je prikazana na slici. Koliki je rad sile na putu od 4m?
3 slajd

Opis slajda:
Tema: Energija. Kinetička energija. Potencijalna energija. Zakon održanja mehaničke energije. Primjena zakona očuvanja Ciljevi časa: Obrazovni: upoznati pojam energije; proučavati dvije vrste mehaničke energije – potencijalnu i kinetičku; razmotriti zakon održanja energije; razviti vještine rješavanja problema. Razvojni: podstiču razvoj govora, podučavaju analizu, poređenje, promovišu razvoj pamćenja i logičkog mišljenja. Obrazovni: pomoć u samoaktualizaciji i samorealizaciji u obrazovnom procesu i budućoj profesionalnoj aktivnosti PLAN PREDAVANJA 1. Mehanička energija 2. Kinetička energija 3. Potencijalna energija 4. Zakon održanja energije (video demonstracija) 5. Primjena zakon održanja energije
4 slajd

Opis slajda:
1. Mehanička energija Mehanički rad (A) je fizička veličina jednaka umnošku modula djelujuće sile putanjom koju tijelo pređe pod djelovanjem sile i kosinusom ugla između njih A=F· S·cosα Mjerna jedinica rada u SI sistemu je J (Joule) 1J=1Nm.
5 slajd

Opis slajda:
Rad je obavljen ako se telo kreće pod dejstvom sile!!! Pogledajmo nekoliko primjera.
6 slajd

Opis slajda:
Za tela koja mogu da rade kažu se da imaju energiju. Energija je fizička veličina koja karakteriše sposobnost tela da vrše rad Jedinica za merenje energije u SI sistemu je (J). Označeno slovom (E)
7 slajd

Opis slajda:
2. Kinetička energija Kako energija tijela ovisi o njegovoj brzini? Da biste to učinili, razmotrite kretanje tijela neke mase m pod djelovanjem konstantne sile (to može biti jedna sila ili rezultanta više sila) usmjerene duž pomaka.
8 slajd

Opis slajda:
Ova sila radi A=F·S Prema drugom Newtonovom zakonu F=m·a Ubrzanje tijela
Slajd 9

Opis slajda:
Zatim, rezultirajuća formula povezuje rad rezultujuće sile koja djeluje na tijelo s promjenom količine Kinetička energija tijela je energija kretanja. Kinetička energija tijela je skalarna veličina koja ovisi o modulu brzine tijela, ali ne ovisi o njegovom smjeru. Tada je rad rezultante svih sila koje djeluju na tijelo jednak promjeni kinetičke energije tijela.
10 slajd

Opis slajda:
Ova izjava se naziva teorema kinetičke energije. Vrijedi bez obzira na to koje sile djeluju na tijelo: elastičnost, trenje ili gravitacija. A rad potreban za ubrzanje metka obavlja sila pritiska barutnih plinova. Tako, na primjer, kada se baca koplje, posao obavlja mišićna snaga osobe.
11 slajd

Opis slajda:
Tako je, na primjer, kinetička energija dječaka koji miruje u odnosu na čamac jednaka nuli u referentnom okviru povezanom s čamcem, a različita od nule u referentnom okviru povezanom s obalom.
12 slajd

Opis slajda:
3. Potencijalna energija Druga vrsta mehaničke energije je potencijalna energija tijela. Termin "potencijalna energija" skovao je u 19. veku škotski inženjer i fizičar William John Rankine. Rankine, William John Potencijalna energija je energija sistema, određena relativnim položajem tijela (ili dijelova tijela jedni prema drugima) i prirodom interakcijskih sila između njih.
Slajd 13

Opis slajda:
Vrijednost jednaka umnošku mase tijela, ubrzanja gravitacije i visine tijela iznad nultog nivoa naziva se potencijalna energija tijela u gravitacionom polju.Rad gravitacije jednak je smanjenju potencijalna energija tela u gravitacionom polju Zemlje.
Slajd 14

Opis slajda:
Pri promjeni veličine deformacije djeluje elastična sila koja ovisi o izduženju opruge u početnom i konačnom položaju.Na desnoj strani jednačine je promjena vrijednosti sa predznakom minus. Dakle, kao iu slučaju gravitacije, veličina Dakle, rad elastične sile jednak je promjeni potencijalne energije elastično deformiranog tijela, uzete sa suprotnim predznakom.
15 slajd

Opis slajda:
4. Zakon održanja energije Tela mogu istovremeno posedovati i kinetičku i potencijalnu energiju. Dakle, zbir kinetičke i potencijalne energije tijela naziva se ukupna mehanička energija tijela ili jednostavno mehanička energija. Da li je moguće promijeniti mehaničku energiju sistema i, ako jeste, kako?
16 slajd

Opis slajda:
Razmotrimo zatvoreni sistem “kocka – nagnuta ravan – Zemlja.” Prema teoremi kinetičke energije, promjena kinetičke energije kocke jednaka je radu svih sila koje djeluju na tijelo.
Slajd 17

Opis slajda:
Tada nalazimo da do povećanja kinetičke energije kocke dolazi zbog smanjenja njene potencijalne energije. Posljedično, zbir promjena kinetičke i potencijalne energije tijela jednak je nuli. To znači da ukupna mehanička energija zatvorenog sistema tijela u interakciji sa gravitacijskim silama ostaje konstantna. (Isti rezultat se može dobiti i pod dejstvom elastične sile.) Ova izjava je zakon održanja energije u mehanici.
18 slajd

Opis slajda:
Slajd 19

Opis slajda:
Jedna od posljedica zakona održanja i transformacije energije je tvrdnja o nemogućnosti stvaranja „perpetual motion machine“ – mašine koja bi mogla da obavlja rad neograničeno bez trošenja energije.
20 slajd

Opis slajda:
ZADACI ZA UČVRŠĆIVANJE DOBIJENOG ZNANJA Metak mase 20 g ispaljuje se pod uglom od 600 u odnosu na horizontalu sa početnom brzinom od 600 m/s. Odredite kinetičku energiju metka u trenutku njegovog najvećeg porasta. Opruga drži vrata. Da biste lagano otvorili vrata, istegnuvši oprugu za 3 cm, potrebno je primijeniti silu jednaku 60 N. Da biste otvorili vrata, morate oprugu rastegnuti za 8 cm. zatvorena vrata? Kamen se baca okomito naviše sa površine Zemlje brzinom od 10 m/s. Na kojoj visini će se kinetička energija kamena smanjiti za 5 puta u odnosu na početnu kinetičku energiju
21 slajd

Opis slajda:
Horizontalno. 1. Jedinica za energiju u SI sistemu. 4. Tijelo je klasičan primjer za opisivanje mlaznog kretanja. 5. Fizička veličina jednaka radu u jedinici vremena. 7. Svojstvo sistema neophodno za očuvanje impulsa ili energije. 9. Značenje riječi "impuls" u prijevodu sa latinskog. 12. Opšte svojstvo određenog broja veličina, čija je suština nepromjenljivost veličine tokom vremena u zatvorenom sistemu. 13. Jedinica snage u SI sistemu. Vertikalno. 2. Stanje sistema u kojem je potencijalna energija nula je nula... . 3. Opšte svojstvo potencijalne i kinetičke energije, koje izražava njihovu zavisnost od izbora referentnog tijela. 4. Fizička veličina jednaka proizvodu projekcije sile na smjer kretanja i modula kretanja. 6. Fizička veličina jednaka proizvodu mase tijela i njegove brzine. 8. Količina koja se poklapa u smjeru s impulsom tijela. 9. Tvrdnja čija je suština da je promjena kinetičke energije jednaka radu rezultante svih sila primijenjenih na tijelo. 10. Jedna od veličina od koje zavisi promjena količine kretanja tijela. 11. Količina koja karakteriše sposobnost tela (sistema) da izvrši rad.
Zbog svog položaja u polju djelovanja snaga. Druga definicija: potencijalna energija je funkcija koordinata, što je pojam u Lagranžijanu sistema i opisuje interakciju elemenata sistema. Termin "potencijalna energija" skovao je u 19. veku škotski inženjer i fizičar William Rankine.
SI jedinica za energiju je džul.
Pretpostavlja se da je potencijalna energija nula za određenu konfiguraciju tijela u prostoru, čiji je izbor određen pogodnošću daljih proračuna. Proces odabira ove konfiguracije naziva se normalizacija potencijalne energije.
Ispravna definicija potencijalne energije može se dati samo u polju sila čiji rad ovisi samo o početnom i konačnom položaju tijela, ali ne i o putanji njegovog kretanja. Takve sile se nazivaju konzervativne.
Također, potencijalna energija je karakteristika interakcije više tijela ili tijela i polja.
Svaki fizički sistem teži stanju sa najnižom potencijalnom energijom.
Strogo rečeno, kinetička energija je razlika između ukupne energije sistema i njegove energije mirovanja; dakle, kinetička energija je dio ukupne energije uslijed kretanja.
Kinetička energija
Razmotrimo sistem koji se sastoji od jedne čestice i napišemo jednačinu kretanja:
Postoji rezultanta svih sila koje djeluju na tijelo. Hajde da skalarno pomnožimo jednačinu sa pomakom čestice. S obzirom na to, dobijamo:
- moment inercije tijela
- ugaona brzina tela.
Zakon o očuvanju energije.
Zakon održanja energije je temeljni zakon prirode, ustanovljen empirijski, koji kaže da se energija izolovanog (zatvorenog) fizičkog sistema održava tokom vremena. Drugim riječima, energija ne može nastati iz ničega i ne može nestati u ništa, može samo prelaziti iz jednog oblika u drugi.
Sa fundamentalne tačke gledišta, prema Noetherovoj teoremi, zakon održanja energije je posljedica homogenosti vremena i u tom smislu je univerzalan, odnosno inherentan sistemima vrlo različite fizičke prirode. Drugim riječima, za svaki konkretan zatvoreni sistem, bez obzira na njegovu prirodu, moguće je odrediti određenu količinu koja se zove energija, koja će se tokom vremena očuvati. Štaviše, ispunjenje ovog zakona održanja u svakom konkretnom sistemu opravdava se podređenošću ovog sistema njegovim specifičnim zakonima dinamike, koji se generalno razlikuju za različite sisteme.
Međutim, u različitim granama fizike, iz istorijskih razloga, zakon održanja energije je drugačije formulisan, pa stoga govori o očuvanju različitih vrsta energije. Na primjer, u termodinamici se zakon održanja energije izražava kao prvi zakon termodinamike.
Budući da se zakon održanja energije ne primjenjuje na određene količine i pojave, već odražava opći obrazac koji je primjenjiv svuda i uvijek, ispravnije ga je nazvati ne zakonom, već principom održanja energije.
Sa matematičke tačke gledišta, zakon održanja energije je ekvivalentan izjavi da sistem diferencijalnih jednačina koje opisuju dinamiku datog fizičkog sistema ima prvi integral kretanja povezan sa
Tjelesni impuls
Moment kretanja tijela je veličina jednaka proizvodu mase tijela i njegove brzine.
Treba imati na umu da je riječ o tijelu koje se može predstaviti kao materijalna tačka. Zamah tijela ($p$) se također naziva impulsom. Koncept impulsa u fiziku je uveo René Descartes (1596–1650). Termin “impuls” pojavio se kasnije (impulsus na latinskom znači “gurati”). Moment je vektorska veličina (poput brzine) i izražava se formulom:
$p↖(→)=mυ↖(→)$
Smjer vektora impulsa uvijek se poklapa sa smjerom brzine.
SI jedinica impulsa je impuls tijela mase $1$ kg koje se kreće brzinom od $1$ m/s; prema tome, jedinica impulsa je $1$ kg $·$ m/s.
Ako konstantna sila djeluje na tijelo (materijalnu tačku) tokom vremenskog perioda $∆t$, tada će i ubrzanje biti konstantno:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
gdje su $(υ_1)↖(→)$ i $(υ_2)↖(→)$ početna i konačna brzina tijela. Zamjenom ove vrijednosti u izraz drugog Newtonovog zakona, dobijamo:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
Otvarajući zagrade i koristeći izraz za impuls tijela, imamo:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
Ovdje je $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ promjena zamaha tokom vremena $∆t$. Tada će prethodna jednačina poprimiti oblik:
$∆p↖(→)=F↖(→)∆t$
Izraz $∆p↖(→)=F↖(→)∆t$ je matematički prikaz drugog Newtonovog zakona.
Zove se proizvod sile i trajanja njenog djelovanja impuls sile. Zbog toga promjena količine gibanja tačke jednaka je promjeni impulsa sile koja na nju djeluje.
Izraz $∆p↖(→)=F↖(→)∆t$ naziva se jednačina kretanja tijela. Treba napomenuti da se ista radnja - promjena momenta gibanja tačke - može postići malom silom u dužem vremenskom periodu i velikom silom u kratkom vremenskom periodu.
Impuls sistema tel. Zakon promjene momenta
Impuls (količina kretanja) mehaničkog sistema je vektor jednak zbiru impulsa svih materijalnih tačaka ovog sistema:
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
Zakoni promjene i održanja impulsa posljedica su drugog i trećeg Newtonovog zakona.
Razmotrimo sistem koji se sastoji od dva tijela. Sile ($F_(12)$ i $F_(21)$ na slici sa kojima tijela sistema međusobno međusobno djeluju nazivaju se unutrašnje.
Neka, pored unutrašnjih sila, na sistem djeluju i vanjske sile $(F_1)↖(→)$ i $(F_2)↖(→)$. Za svako tijelo možemo napisati jednačinu $∆p↖(→)=F↖(→)∆t$. Zbrajanjem lijeve i desne strane ovih jednačina dobijamo:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
Prema trećem Newtonovom zakonu, $(F_(12))↖(→)=-(F_(21))↖(→)$.
dakle,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
Na lijevoj strani nalazi se geometrijski zbir promjena impulsa svih tijela sistema, jednak promjeni impulsa samog sistema - $(∆p_(syst))↖(→)$. računa, jednakost $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ može se napisati:
$(∆p_(syst))↖(→)=F↖(→)∆t$
gdje je $F↖(→)$ zbir svih vanjskih sila koje djeluju na tijelo. Dobijeni rezultat znači da se impuls sistema može mijenjati samo vanjskim silama, a promjena momenta gibanja sistema je usmjerena na isti način kao i ukupna vanjska sila. Ovo je suština zakona promjene količine gibanja mehaničkog sistema.
Unutrašnje sile ne mogu promijeniti ukupni zamah sistema. One samo menjaju impulse pojedinih tela sistema.
Zakon održanja impulsa
Zakon održanja impulsa slijedi iz jednačine $(∆p_(syst))↖(→)=F↖(→)∆t$. Ako na sistem ne djeluju vanjske sile, desna strana jednačine $(∆p_(syst))↖(→)=F↖(→)∆t$ postaje nula, što znači da ukupni impuls sistema ostaje nepromijenjen :
$(∆p_(syst))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
Sistem na koji ne djeluju vanjske sile ili je rezultanta vanjskih sila nula naziva se zatvoreno.
Zakon održanja impulsa glasi:
Ukupni impuls zatvorenog sistema tijela ostaje konstantan za bilo koju interakciju tijela sistema jedno s drugim.
Dobijeni rezultat vrijedi za sistem koji sadrži proizvoljan broj tijela. Ako zbir vanjskih sila nije jednak nuli, ali je zbir njihovih projekcija na neki smjer jednak nuli, tada se projekcija impulsa sistema na ovaj smjer ne mijenja. Tako se, na primjer, sistem tijela na površini Zemlje ne može smatrati zatvorenim zbog sile gravitacije koja djeluje na sva tijela, međutim zbir projekcija impulsa u horizontalnom smjeru može ostati nepromijenjen (u odsustvu trenja), budući da u ovom smjeru ne djeluje sila gravitacije.
Mlazni pogon
Razmotrimo primjere koji potvrđuju valjanost zakona održanja impulsa.
Uzmimo dječju gumenu loptu, naduvamo je i pustimo. Videćemo da kada vazduh počne da ga napušta u jednom pravcu, sama lopta će leteti u drugom. Kretanje lopte je primjer mlaznog kretanja. Objašnjava se zakonom održanja količine gibanja: ukupni impuls sistema „loptica plus vazduh u njoj“ pre nego što vazduh iscuri je nula; mora ostati jednak nuli tokom kretanja; dakle, lopta se kreće u smjeru suprotnom od smjera strujanja mlaza, i to takvom brzinom da je njen zamah po veličini jednak impulsu vazdušnog mlaza.
Jet motion nazivamo kretanje tijela koje nastaje kada se neki njegov dio odvoji od njega bilo kojom brzinom. Zbog zakona održanja količine gibanja, smjer kretanja tijela je suprotan smjeru kretanja odvojenog dijela.
Letovi raketama su zasnovani na principu mlaznog pogona. Moderna svemirska raketa je veoma složena letelica. Masa rakete sastoji se od mase radnog fluida (tj. vrelih gasova koji nastaju kao rezultat sagorevanja goriva i koji se emituju u obliku mlazne struje) i konačne, ili, kako kažu, „suhe“ mase raketa preostala nakon što se radni fluid izbaci iz rakete.
Kada se mlaz gasa izbacuje iz rakete velikom brzinom, sama raketa juri u suprotnom smjeru. Prema zakonu održanja količine gibanja, zamah $m_(p)υ_p$ dobijen od strane rakete mora biti jednak impulsu $m_(gas)·υ_(gas)$ izbačenih plinova:
$m_(p)υ_p=m_(gas)·υ_(gas)$
Iz toga slijedi da je brzina rakete
$υ_p=((m_(gas))/(m_p))·υ_(gas)$
Iz ove formule jasno je da što je veća brzina rakete, to je veća brzina emitovanih gasova i odnos mase radnog fluida (tj. mase goriva) i konačnog („suvog“) masa rakete.
Formula $υ_p=((m_(gas))/(m_p))·υ_(gas)$ je približna. Ne uzima se u obzir da kako gorivo sagorijeva, masa leteće rakete postaje sve manja. Tačnu formulu za brzinu rakete dobio je 1897. K. E. Tsiolkovsky i nosi njegovo ime.
Rad sile
Termin „rad“ je u fiziku uveo francuski naučnik J. Poncelet 1826. godine. Ako se u svakodnevnom životu rad naziva samo ljudskim radom, onda je u fizici, a posebno u mehanici, općenito prihvaćeno da se rad obavlja silom. Fizička količina rada obično se označava slovom $A$.
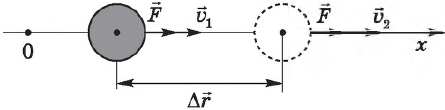
Rad sile je mjera djelovanja sile, u zavisnosti od njene veličine i smjera, kao i od kretanja tačke primjene sile. Za konstantnu silu i linearni pomak rad je određen jednakošću:
$A=F|∆r↖(→)|cosα$
gdje je $F$ sila koja djeluje na tijelo, $∆r↖(→)$ je pomak, $α$ je ugao između sile i pomaka.

Rad sile jednak je proizvodu modula sile i pomaka i kosinusa ugla između njih, tj. skalarnom proizvodu vektora $F↖(→)$ i $∆r↖(→)$.
Rad je skalarna veličina. Ako je $α 0$, a ako je $90°
Kada na tijelo djeluje više sila, ukupan rad (zbir rada svih sila) jednak je radu rezultirajuće sile.
Jedinica rada u SI je joule($1$ J). $1$ J je rad koji izvrši sila od $1$ N duž puta od $1$ m u smjeru djelovanja ove sile. Ova jedinica je dobila ime po engleskom naučniku J. Jouleu (1818-1889): $1$ J = $1$ N $·$ m. Često se koriste i kilodžuli i milidžuli: $1$ kJ $= 1000$ J, $1$ mJ $ = 0,001 USD J.
Rad gravitacije
Razmotrimo tijelo koje klizi duž nagnute ravni sa uglom nagiba $α$ i visinom $H$.

Izrazimo $∆x$ u terminima $H$ i $α$:
$∆x=(H)/(sinα)$
S obzirom da sila gravitacije $F_t=mg$ čini ugao ($90° - α$) sa smjerom kretanja, koristeći formulu $∆x=(H)/(sin)α$, dobijamo izraz za rad gravitacije $A_g$:
$A_g=mg cos(90°-α) (H)/(sinα)=mgH$
Iz ove formule je jasno da rad gravitacije zavisi od visine i ne zavisi od ugla nagiba ravnine.
Iz toga slijedi da:
- rad gravitacije ne zavisi od oblika putanje po kojoj se telo kreće, već samo od početnog i konačnog položaja tela;
- kada se tijelo kreće po zatvorenoj putanji, rad gravitacije je nula, tj. gravitacija je konzervativna sila (sile koje imaju ovo svojstvo nazivaju se konzervativne).
Rad reakcionih snaga, jednaka je nuli, pošto je sila reakcije ($N$) usmjerena okomito na pomak $∆x$.
Rad sile trenja
Sila trenja je usmjerena suprotno od pomaka $∆x$ i sa njom čini ugao od $180°$, stoga je rad sile trenja negativan:
$A_(tr)=F_(tr)∆x·cos180°=-F_(tr)·∆x$
Pošto je $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ onda
$A_(tr)=μmgHctgα$
Rad elastične sile
Neka vanjska sila $F↖(→)$ djeluje na nerastegnutu oprugu dužine $l_0$, istežući je za $∆l_0=x_0$. U poziciji $x=x_0F_(kontrola)=kx_0$. Nakon što sila $F↖(→)$ prestane djelovati u tački $x_0$, opruga se sabija pod djelovanjem sile $F_(kontrola)$.

Odredimo rad elastične sile kada se koordinata desnog kraja opruge promijeni sa $x_0$ na $x$. Budući da se elastična sila u ovom području mijenja linearno, Hookeov zakon može koristiti njenu prosječnu vrijednost u ovoj oblasti:
$F_(kontrolna pros.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
Tada je rad (uzimajući u obzir činjenicu da se pravci $(F_(control av.))↖(→)$ i $(∆x)↖(→)$ podudaraju) jednak:
$A_(kontrola)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
Može se pokazati da oblik posljednje formule ne zavisi od ugla između $(F_(kontrola av.))↖(→)$ i $(∆x)↖(→)$. Rad elastičnih sila ovisi samo o deformacijama opruge u početnom i konačnom stanju.
Dakle, sila elastičnosti, kao i sila gravitacije, je konzervativna sila.
Power power
Snaga je fizička veličina koja se mjeri odnosom rada i vremena u kojem se proizvodi.
Drugim riječima, snaga pokazuje koliko se rada obavi u jedinici vremena (u SI - po $1$ s).
Snaga se određuje po formuli:
gdje je $N$ snaga, $A$ je rad obavljen za vrijeme $∆t$.
Zamjenom u formulu $N=(A)/(∆t)$ umjesto rada $A$ njegov izraz $A=F|(∆r)↖(→)|cosα$, dobijamo:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
Snaga je jednaka proizvodu veličina vektora sile i brzine i kosinusa ugla između ovih vektora.
Snaga u SI sistemu mjeri se u vatima (W). Jedan vat ($1$ W) je snaga pri kojoj se $1$ J obavlja rad za $1$ s: $1$ W $= 1$ J/s.
Ova jedinica je dobila ime po engleskom pronalazaču J. Watt-u (Watt), koji je napravio prvu parnu mašinu. Sam J. Watt (1736-1819) koristio je drugu jedinicu snage - konjske snage (KS), koju je uveo da bi mogao uporediti performanse parne mašine i konja: 1$ KS. $= 735,5$ W.
U tehnologiji se često koriste veće jedinice snage - kilovat i megavat: $1$ kW $= 1000$ W, $1$ MW $= 1000000$ W.
Kinetička energija. Zakon promjene kinetičke energije
Ako tijelo ili nekoliko tijela u interakciji (sistem tijela) mogu obavljati rad, onda se kaže da imaju energiju.
Riječ "energija" (od grčkog energia - djelovanje, aktivnost) često se koristi u svakodnevnom životu. Na primjer, ljudi koji mogu brzo obavljati posao nazivaju se energičnima, koji imaju veliku energiju.
Energija koju tijelo posjeduje zbog kretanja naziva se kinetička energija.
Kao iu slučaju definicije energije općenito, za kinetičku energiju možemo reći da je kinetička energija sposobnost tijela koje se kreće da izvrši rad.
Nađimo kinetičku energiju tijela mase $m$ koje se kreće brzinom $υ$. Budući da je kinetička energija energija zbog kretanja, njeno nulto stanje je stanje u kojem tijelo miruje. Nakon što smo pronašli rad potreban da se nekom tijelu prenese određena brzina, naći ćemo njegovu kinetičku energiju.
Da bismo to učinili, izračunajmo rad u području pomaka $∆r↖(→)$ kada se poklapaju smjerovi vektora sile $F↖(→)$ i pomaka $∆r↖(→)$. U ovom slučaju rad je jednak
gdje je $∆x=∆r$
Za kretanje tačke sa ubrzanjem $α=const$, izraz za pomicanje ima oblik:
$∆x=υ_1t+(at^2)/(2),$
gdje je $υ_1$ početna brzina.
Zamjenom u jednačinu $A=F·∆x$ izraz za $∆x$ iz $∆x=υ_1t+(at^2)/(2)$ i korištenjem Newtonovog drugog zakona $F=ma$, dobijamo:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
Izražavanje ubrzanja kroz početnu $υ_1$ i konačnu $υ_2$ brzine $a=(υ_2-υ_1)/(t)$ i zamjenu u $A=ma(υ_1t+(at^2)/(2))=(mat )/ (2)(2υ_1+at)$ imamo:
$A=(m(υ_2-υ_1))/(2)·(2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
Sada izjednačavajući početnu brzinu sa nulom: $υ_1=0$, dobijamo izraz za kinetička energija:
$E_K=(mυ)/(2)=(p^2)/(2m)$
Dakle, tijelo koje se kreće ima kinetičku energiju. Ova energija je jednaka radu koji se mora obaviti da se brzina tijela poveća od nule do vrijednosti $υ$.
Iz $E_K=(mυ)/(2)=(p^2)/(2m)$ slijedi da je rad koji izvrši sila da pomjeri tijelo iz jednog položaja u drugi jednak promjeni kinetičke energije:
$A=E_(K_2)-E_(K_1)=∆E_K$
Jednakost $A=E_(K_2)-E_(K_1)=∆E_K$ izražava teorema o promjeni kinetičke energije.
Promjena kinetičke energije tijela(materijalna tačka) za određeni vremenski period jednaka je radu koji za to vrijeme izvrši sila koja djeluje na tijelo.
Potencijalna energija
Potencijalna energija je energija određena relativnim položajem tijela ili dijelova istog tijela u interakciji.
Pošto je energija definisana kao sposobnost tela da izvrši rad, potencijalna energija se prirodno definiše kao rad sile, koji zavisi samo od relativnog položaja tela. Ovo je rad gravitacije $A=mgh_1-mgh_2=mgH$ i rad elastičnosti:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
Potencijalna energija tijela u interakciji sa Zemljom, oni nazivaju količinu jednaku proizvodu mase $m$ ovog tijela ubrzanjem slobodnog pada $g$ i visinom $h$ tijela iznad površine Zemlje:
Potencijalna energija elastično deformiranog tijela je vrijednost jednaka polovini proizvoda koeficijenta elastičnosti (krutosti) $k$ tijela i kvadratne deformacije $∆l$:
$E_p=(1)/(2)k∆l^2$
Rad konzervativnih sila (gravitacije i elastičnosti), uzimajući u obzir $E_p=mgh$ i $E_p=(1)/(2)k∆l^2$, izražava se na sljedeći način:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
Ova formula nam omogućava da damo opštu definiciju potencijalne energije.
Potencijalna energija sistema je veličina koja zavisi od položaja tela čija je promena pri prelasku sistema iz početnog stanja u konačno stanje jednaka radu unutrašnjih konzervativnih sila sistema, uzeti sa suprotnim predznakom.
Znak minus na desnoj strani jednačine $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ znači da kada rad obavljaju unutrašnje sile ( na primjer, pada tijela na tlo pod uticajem gravitacije u sistemu „kamena-zemlja“), energija sistema se smanjuje. Rad i promjene potencijalne energije u sistemu uvijek imaju suprotne predznake.
Pošto rad određuje samo promjenu potencijalne energije, onda samo promjena energije ima fizičko značenje u mehanici. Stoga je izbor nultog energetskog nivoa proizvoljan i određen isključivo zbog pogodnosti, na primjer, lakoće pisanja odgovarajućih jednačina.
Zakon promjene i održanja mehaničke energije
Ukupna mehanička energija sistema zbir njegove kinetičke i potencijalne energije naziva se:
Određuje se položajem tijela (potencijalna energija) i njihovom brzinom (kinetička energija).
Prema teoremi kinetičke energije,
$E_k-E_(k_1)=A_p+A_(pr),$
gdje je $A_p$ rad potencijalnih sila, $A_(pr)$ je rad ne-potencijalnih sila.
Zauzvrat, rad potencijalnih sila jednak je razlici potencijalne energije tijela u početnom $E_(p_1)$ i konačnom $E_p$ stanju. Uzimajući ovo u obzir, dobijamo izraz za zakon promjene mehaničke energije:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
gdje je lijeva strana jednakosti promjena ukupne mehaničke energije, a desna je rad nepotencijalnih sila.
dakle, zakon promjene mehaničke energije glasi:
Promjena mehaničke energije sistema jednaka je radu svih nepotencijalnih sila.
Mehanički sistem u kojem djeluju samo potencijalne sile naziva se konzervativan.
U konzervativnom sistemu $A_(pr) = 0$. ovo implicira zakon održanja mehaničke energije:
U zatvorenom konzervativnom sistemu, ukupna mehanička energija je očuvana (ne mijenja se s vremenom):
$E_k+E_p=E_(k_1)+E_(p_1)$
Zakon održanja mehaničke energije izveden je iz Newtonovih zakona mehanike, koji su primenljivi na sistem materijalnih tačaka (ili makročestica).
Međutim, zakon održanja mehaničke energije vrijedi i za sistem mikročestica, gdje sami Newtonovi zakoni više ne vrijede.
Zakon održanja mehaničke energije je posljedica jednoličnosti vremena.
Ujednačenost vremena je da, pod istim početnim uslovima, pojava fizičkih procesa ne zavisi od toga u kom trenutku su ti uslovi stvoreni.
Zakon održanja ukupne mehaničke energije znači da kada se kinetička energija u konzervativnom sistemu promijeni, mora se promijeniti i njegova potencijalna energija, tako da njihov zbir ostane konstantan. To znači mogućnost pretvaranja jedne vrste energije u drugu.
U skladu sa različitim oblicima kretanja materije, razmatraju se različite vrste energije: mehanička, unutrašnja (jednaka zbiru kinetičke energije haotičnog kretanja molekula u odnosu na centar mase tela i potencijalne energije interakcija molekula međusobno), elektromagnetska, hemijska (koja se sastoji od kinetičke energije kretanja elektrona i električne energije njihove interakcije međusobno i sa atomskim jezgrima), nuklearna, itd. Iz navedenog je jasno da podjela energije na različite vrste je prilično proizvoljna.
Prirodne pojave obično su praćene transformacijom jedne vrste energije u drugu. Na primjer, trenje dijelova raznih mehanizama dovodi do pretvaranja mehaničke energije u toplinu, tj. unutrašnja energija. U toplotnim motorima, naprotiv, unutrašnja energija se pretvara u mehaničku energiju; u galvanskim ćelijama hemijska energija se pretvara u električnu energiju itd.
Trenutno je koncept energije jedan od osnovnih koncepata fizike. Ovaj koncept je neraskidivo povezan sa idejom transformacije jednog oblika kretanja u drugi.
Ovako je koncept energije formuliran u modernoj fizici:
Energija je opća kvantitativna mjera kretanja i interakcije svih vrsta materije. Energija se ne pojavljuje ni iz čega i ne nestaje, može samo prelaziti iz jednog oblika u drugi. Koncept energije povezuje sve prirodne pojave.
Jednostavni mehanizmi. Efikasnost mehanizma
Jednostavni mehanizmi su uređaji koji mijenjaju veličinu ili smjer sila koje se primjenjuju na tijelo.
Koriste se za pomicanje ili podizanje velikih tereta uz malo napora. To uključuje polugu i njene varijante - blokove (pokretne i fiksne), kapije, nagnutu ravninu i njene vrste - klin, vijak itd.
Ruka poluge. Pravilo poluge
Poluga je kruto tijelo sposobno da se okreće oko fiksnog oslonca.

Pravilo poluge kaže:
Poluga je u ravnoteži ako su sile primijenjene na nju obrnuto proporcionalne njihovim rukama:
$(F_2)/(F_1)=(l_1)/(l_2)$
Iz formule $(F_2)/(F_1)=(l_1)/(l_2)$, primjenjujući svojstvo proporcije na nju (proizvod ekstremnih članova proporcije jednak je proizvodu njenih srednjih članova), mi može dobiti sljedeću formulu:
Ali $F_1l_1=M_1$ je moment sile koja teži da okrene ručicu u smjeru kazaljke na satu, a $F_2l_2=M_2$ je moment sile koja pokušava da okrene ručicu u smjeru suprotnom od kazaljke na satu. Dakle, $M_1=M_2$, što je trebalo dokazati.
Polugu su ljudi počeli koristiti u davna vremena. Uz njegovu pomoć bilo je moguće podići teške kamene ploče tokom izgradnje piramida u starom Egiptu. Bez poluge ovo ne bi bilo moguće. Uostalom, na primjer, za izgradnju Keopsove piramide, koja ima visinu od 147$ m, utrošeno je više od dva miliona kamenih blokova, od kojih je najmanji težio 2,5$ tona!
Danas se poluge široko koriste kako u proizvodnji (na primjer, dizalice), tako iu svakodnevnom životu (makaze, rezači žice, vage).
Fiksni blok
Djelovanje fiksnog bloka je slično djelovanju poluge sa jednakim krakovima: $l_1=l_2=r$. Primijenjena sila $F_1$ jednaka je opterećenju $F_2$, a uvjet ravnoteže je:
Fiksni blok koristi se kada trebate promijeniti smjer sile bez promjene njene veličine.
Pokretni blok
Pokretni blok djeluje slično kao poluga, čiji su krakovi: $l_2=(l_1)/(2)=r$. U ovom slučaju, uvjet ravnoteže ima oblik:
gdje je $F_1$ primijenjena sila, $F_2$ je opterećenje. Upotreba pokretnog bloka daje dvostruko povećanje snage.
Dizalica sa remenicama (blok sistem)
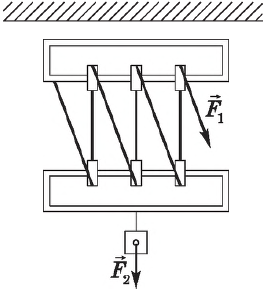
Konvencionalna lančana dizalica sastoji se od $n$ pokretnih i $n$ fiksnih blokova. Njegovo korištenje daje dobit od $2n$ puta:
$F_1=(F_2)/(2n)$
Električna lančana dizalica sastoji se od n pokretnih i jednog fiksnog bloka. Korištenje remenice daje snagu od $2^n$ puta:
$F_1=(F_2)/(2^n)$

Screw
Vijak je nagnuta ravan namotana oko ose.

Uslov ravnoteže za sile koje djeluju na propeler ima oblik:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

gdje je $F_1$ vanjska sila primijenjena na propeler i djeluje na udaljenosti $R$ od njegove ose; $F_2$ je sila koja djeluje u smjeru ose propelera; $h$ — korak propelera; $r$ je prosječni radijus navoja; $α$ je ugao nagiba niti. $R$ je dužina poluge (ključa) koja rotira vijak sa silom od $F_1$.
Efikasnost
Koeficijent efikasnosti (efikasnosti) je omjer korisnog rada i cjelokupnog utrošenog rada.
Efikasnost se često izražava u postocima i označava se grčkim slovom $η$ („ovo“):
$η=(A_p)/(A_3)·100%$
gdje je $A_n$ koristan rad, $A_3$ je sav potrošeni rad.
Korisni rad uvijek čini samo dio ukupnog rada koji osoba provodi koristeći jedan ili drugi mehanizam.
Dio obavljenog posla troši se na savladavanje sila trenja. Pošto je $A_3 > A_n$, efikasnost je uvijek manja od $1$ (ili $< 100%$).
Pošto se svako od djela u ovoj jednakosti može izraziti kao proizvod odgovarajuće sile i prijeđenog puta, može se prepisati na sljedeći način: $F_1s_1≈F_2s_2$.
Iz toga slijedi da, dobivši uz pomoć mehanizma na snazi, gubimo isti broj puta usput, i obrnuto. Ovaj zakon se naziva zlatnim pravilom mehanike.
Zlatno pravilo mehanike je približan zakon, jer ne uzima u obzir rad savladavanja trenja i gravitacije dijelova uređaja koji se koriste. Ipak, može biti vrlo korisno u analizi rada bilo kojeg jednostavnog mehanizma.

Tako, na primjer, zahvaljujući ovom pravilu možemo odmah reći da će radnik prikazan na slici, uz dvostruko povećanje sile podizanja tereta za $10$ cm, morati spustiti suprotni kraj poluge za $20 $ cm.
Sudar tijela. Elastični i neelastični udari
Za rješavanje problema gibanja tijela nakon sudara koriste se zakoni održanja impulsa i mehaničke energije: iz poznatih impulsa i energija prije sudara određuju se vrijednosti ovih veličina nakon sudara. Razmotrimo slučajeve elastičnih i neelastičnih udara.
Udar se naziva apsolutno neelastičnim, nakon čega tijela formiraju jedno tijelo koje se kreće određenom brzinom. Problem brzine potonjeg rješava se korištenjem zakona održanja impulsa sistema tijela s masama $m_1$ i $m_2$ (ako govorimo o dva tijela) prije i nakon udara:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
Očigledno je da kinetička energija tijela tokom neelastičnog udara nije očuvana (na primjer, za $(υ_1)↖(→)=-(υ_2)↖(→)$ i $m_1=m_2$ postaje jednaka nuli nakon udara).
Udar u kojem je sačuvan ne samo zbir impulsa, već i zbir kinetičkih energija udarnih tijela naziva se apsolutno elastičnim.
Za apsolutno elastičan udar važe sljedeće jednačine:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2) )^2)/(2)$
gdje su $m_1, m_2$ mase loptica, $υ_1, υ_2$ su brzine loptica prije udara, $υ"_1, υ"_2$ su brzine loptica nakon udara.
Energija- univerzalna mjera raznih oblika kretanja i interakcije.
Promjena mehaničkog kretanja tijela uzrokovana je silama koje na njega djeluju iz drugih tijela. Da bi se kvantitativno opisao proces razmene energije između tela u interakciji, u mehanici se uvodi koncept rad sile.
Ako se tijelo kreće pravolinijski i na njega djeluje stalna sila F, čineći određeni ugao α sa smerom kretanja, tada je rad ove sile jednak projekciji sile F s na smer kretanja (F s = Fcosα), pomnoženoj sa odgovarajućim kretanjem tačke primene od sile:
Ako uzmemo dio putanje od tačke 1 do tačke 2, onda je rad na njemu jednak algebarskom zbiru elementarnog rada na pojedinačnim infinitezimalnim dijelovima puta. Stoga se ovaj zbir može svesti na integral ![]()
Jedinica rada - joule(J): 1 J je rad koji izvrši sila od 1 N duž puta od 1 m (1 J = 1 N m).
Za karakterizaciju brzine obavljenog posla uvodi se koncept snage:
Tokom vremena dt sila F radi F d r, i moć koju ova sila razvija u datom trenutku ![]() tj. jednaka je skalarnom proizvodu vektora sile i vektora brzine kojim se kreće tačka primjene ove sile; N je skalarna veličina.
tj. jednaka je skalarnom proizvodu vektora sile i vektora brzine kojim se kreće tačka primjene ove sile; N je skalarna veličina.
Jedinica snage - watt(W): 1 W - snaga pri kojoj se 1 J rada obavlja u 1 s (1 W = 1 J/s)
Kinetička i potencijalna energija.
Kinetička energija mehaničkog sistema je energija mehaničkog kretanja sistema koji se razmatra.
Force F, djelujući na tijelo koje miruje i pokreće ga, vrši rad, a energija tijela koje se kreće povećava se za količinu utrošenog rada. To znači da je rad sile dA F duž puta koji je tijelo prošlo pri porastu brzine od 0 do v, troši se na povećanje kinetičke energije dT tijela, tj.
Koristeći drugi Newtonov zakon i množenje pomakom d r dobijamo
(1)
Iz formule (1) jasno je da kinetička energija zavisi samo od mase i brzine tijela (ili tačke), odnosno kinetička energija tijela ovisi samo o stanju njegovog kretanja.
Potencijalna energija- mehanička energija tjelesnih sistema, što je određeno prirodom interakcijskih sila između njih i njihovim međusobnim položajem.
Neka interakciju tijela jedno na drugo vrše polja sila (na primjer, polja elastičnih sila, polja gravitacijskih sila), koja se odlikuju činjenicom da rad sila koje djeluju u sistemu prilikom kretanja tijela od prve pozicije do druge ne zavisi od putanje duž koje se odvija kretanje, već zavisi samo od početni i krajnji položaj sistema. Takva polja se nazivaju potencijal, a sile koje djeluju u njima su konzervativan. Ako rad sile zavisi od putanje tijela koje se kreće iz jednog položaja u drugi, tada se takva sila naziva disipativno; Primjer disipativne sile je sila trenja.
Specifičan oblik funkcije P ovisi o vrsti polja sile. Na primjer, potencijalna energija tijela mase m podignutog na visinu h iznad površine Zemlje jednaka je (7)
Ukupna mehanička energija sistema - energija mehaničkog kretanja i interakcije:
tj. jednak zbiru kinetičke i potencijalne energije.
Zakon o održanju energije.
odnosno ukupna mehanička energija sistema ostaje konstantna. Izraz (3) je zakon održanja mehaničke energije: u sistemu tijela između kojih djeluju samo konzervativne sile, ukupna mehanička energija je očuvana, odnosno ne mijenja se tokom vremena.
Zovu se mehanički sistemi na čija tijela djeluju samo konzervativne sile (i unutrašnje i vanjske). konzervativni sistemi
, a mi formulišemo zakon održanja mehaničke energije na sledeći način: u konzervativnim sistemima ukupna mehanička energija je očuvana.
9. Udar apsolutno elastičnih i neelastičnih tijela.
Hit je sudar dva ili više tijela koja međusobno djeluju na vrlo kratko vrijeme.
Kada su pogođena, tijela doživljavaju deformaciju. Koncept udara podrazumijeva da se kinetička energija relativnog kretanja udarnih tijela nakratko pretvara u energiju elastične deformacije. Tokom sudara, energija se redistribuira između sudarajućih tijela. Eksperimenti pokazuju da relativna brzina tijela nakon sudara ne dostiže vrijednost prije sudara. To se objašnjava činjenicom da ne postoje savršeno elastična tijela ili savršeno glatke površine. Omjer normalne komponente relativne brzine tijela nakon udara i normalne komponente relativne brzine tijela prije udara naziva se faktor oporavkaε: ε = ν n "/ν n gdje je ν n "-poslije udara; ν n – prije udara.
Ako je za sudarajuća tijela ε=0, tada se takva tijela nazivaju apsolutno neelastična, ako je ε=1 - apsolutno elastična. U praksi za sva tijela 0<ε<1. Но в некоторых случаях тела можно с большой степенью точности рассматривать либо как абсолютно неупругие, либо как абсолютно упругие.
Strike line naziva se prava linija koja prolazi kroz tačku dodira tijela i okomita na površinu njihovog dodira. Udarac se zove centralno, ako se sudarajuća tijela prije udarca kreću duž prave linije koja prolazi kroz njihova središta mase. Ovdje razmatramo samo centralne apsolutno elastične i apsolutno neelastične udare.
Apsolutno elastičan udar- sudar dvaju tijela, uslijed čega na oba tijela koja sudjeluju u sudaru ne ostaju deformacije i sva kinetička energija tijela prije nego što se udar nakon udara ponovo pretvori u prvobitnu kinetičku energiju.
Za apsolutno elastičan udar, zakon održanja kinetičke energije i zakon održanja impulsa su zadovoljeni.
Apsolutno neelastičan udar- sudara dva tijela, uslijed čega se tijela spajaju, krećući se dalje kao jedinstvena cjelina. Potpuno neelastičan udar može se demonstrirati korištenjem plastelinskih (glinenih) kuglica koje se kreću jedna prema drugoj.
Mišići koji pokreću dijelove tijela obavljaju mehanički rad.
Rad u određenom smjeru je proizvod sile (F) koja djeluje u smjeru kretanja tijela duž putanje koju je prešlo (S): A = F * S.
Za obavljanje posla potrebna je energija. Dakle, kako se rad obavlja, energija u sistemu opada. Budući da je za obavljanje posla neophodna opskrba energijom, potonja se može definirati na sljedeći način: Energija je sposobnost obavljanja rada, ona je određena mjera „resursa“ raspoloživog u mehaničkom sistemu za njegovo obavljanje. . Osim toga, energija je mjera prijelaza s jedne vrste kretanja na drugu.
U biomehanici se razmatraju sljedeće glavne vrste energije:
- * potencijal, u zavisnosti od relativnog položaja elemenata mehaničkog sistema ljudskog tela;
- * kinetičko translatorno kretanje;
- * kinetičko rotaciono kretanje;
- * potencijalne deformacije elemenata sistema;
- * termalni;
- * metabolički procesi.
Ukupna energija biomehaničkog sistema jednaka je zbiru svih navedenih vrsta energije.
Podizanjem tijela, sabijanjem opruge, možete akumulirati energiju u potencijalnom obliku za kasniju upotrebu. Potencijalna energija je uvijek povezana s jednom ili drugom silom koja djeluje iz jednog tijela na drugo. Na primjer, Zemlja djeluje gravitacijom na predmet koji pada, komprimirana opruga djeluje na loptu, a navučena tetiva djeluje na strijelu.
Potencijalna energija je energija koju tijelo posjeduje zbog svog položaja u odnosu na druga tijela, ili zbog relativnog položaja dijelova jednog tijela.
Dakle, gravitaciona sila i sila elastičnosti su potencijalne.
Gravitaciona potencijalna energija: Ep = m * g * h
Potencijalna energija elastičnih tijela:
gdje je k krutost opruge; x je njegova deformacija.
Iz gornjih primjera jasno je da se energija može uskladištiti u obliku potencijalne energije (podizanje tijela, sabijanje opruge) za kasniju upotrebu.
U biomehanici se razmatraju i uzimaju u obzir dvije vrste potencijalne energije: zbog relativnog položaja veza tijela sa površinom Zemlje (gravitacijska potencijalna energija); povezana s elastičnom deformacijom elemenata biomehaničkog sistema (kosti, mišići, ligamenti) ili bilo kojih vanjskih predmeta (sportska oprema, oprema).
Kinetička energija se pohranjuje u tijelu tokom kretanja. Tijelo koje se kreće radi zbog svog gubitka. Budući da dijelovi tijela i ljudsko tijelo vrše translacijske i rotacijske pokrete, ukupna kinetička energija (Ek) bit će jednaka:
gdje je m masa, V je linearna brzina, J je moment inercije sistema, u je ugaona brzina.
Energija ulazi u biomehanički sistem zbog metaboličkih metaboličkih procesa koji se odvijaju u mišićima. Promjena energije koja rezultira obavljanjem rada nije visoko efikasan proces u biomehaničkom sistemu, odnosno ne pretvara se sva energija u koristan rad. Dio energije se nepovratno gubi, pretvarajući se u toplinu: samo 25% se koristi za obavljanje posla, preostalih 75% se pretvara i raspršuje u tijelu.
Za biomehanički sistem primenjuje se zakon održanja energije mehaničkog kretanja u obliku:
Epol = Ek + Epot + U,
gdje je Epol ukupna mehanička energija sistema; Ek je kinetička energija sistema; Epot - potencijalna energija sistema; U je unutrašnja energija sistema, koja predstavlja uglavnom toplotnu energiju.
Ukupna energija mehaničkog kretanja biomehaničkog sistema zasniva se na sledeća dva izvora energije: metaboličke reakcije u ljudskom telu i mehanička energija spoljašnje sredine (deformabilni elementi sportske opreme, opreme, potpornih površina; protivnici pri kontaktnim interakcijama). Ova energija se prenosi vanjskim silama.
Karakteristika proizvodnje energije u biomehaničkom sistemu je da se jedan dio energije tokom kretanja troši na izvođenje potrebne motoričke radnje, drugi ide na nepovratno rasipanje uskladištene energije, treći se štedi i koristi prilikom naknadnog kretanja. Prilikom izračunavanja energije utrošene tokom pokreta i mehaničkog rada koji se obavlja tokom ovog procesa, ljudsko tijelo je predstavljeno u obliku modela viševeznog biomehaničkog sistema, sličnog anatomskoj strukturi. Pokreti pojedine karike i pokreti tijela u cjelini razmatraju se u obliku dva jednostavnija tipa kretanja: translacijskog i rotacijskog.
Ukupna mehanička energija neke i-te karike (Epol) može se izračunati kao zbir potencijalne (Epot) i kinetičke energije (Ek). Zauzvrat, Ek se može predstaviti kao zbir kinetičke energije centra mase karike (Ec.c.m.), u kojoj je koncentrisana cijela masa karike, i kinetičke energije rotacije karike u odnosu na centar mase (Ec.Vr.).
Ako je kinematika kretanja karike poznata, ovaj opći izraz za ukupnu energiju veze imat će oblik:
Njutnov kinetički impuls
gdje je mi masa i-te veze; g - ubrzanje slobodnog pada; hi je visina centra mase iznad neke nulte razine (na primjer, iznad površine Zemlje na datoj lokaciji); - brzina translatornog kretanja centra mase; Ji je moment inercije i-te karike u odnosu na trenutnu os rotacije koja prolazi kroz centar mase; u - trenutna ugaona brzina rotacije u odnosu na trenutnu osu.
Rad na promjeni ukupne mehaničke energije veze (Ai) tokom rada od trenutka t1 do momenta t2 jednak je razlici vrijednosti energije u konačnom (Ep(t2)) i početnom (Ep(t1)) momentima kretanja:
Naravno, u ovom slučaju, rad se troši na promjenu potencijalne i kinetičke energije veze.
Ako je količina rada Ai > 0, odnosno energija povećana, onda kažu da je na linku obavljen pozitivan rad. Ako AI< 0, то есть энергия звена уменьшилась, - отрицательная работа.
Način rada za promjenu energije date karike naziva se prevladavanje ako mišići vrše pozitivan rad na vezi; inferiorni ako mišići vrše negativan rad na vezi.
Pozitivan rad se obavlja kada se mišić kontrahuje protiv vanjskog opterećenja, ide na ubrzanje dijelova tijela, tijela u cjelini, sportske opreme itd. Negativan rad se vrši ako se mišići odupiru istezanju uslijed djelovanja vanjskih sila. To se događa kada spuštate teret, spuštate se niz stepenice ili pružate otpor sili koja premašuje snagu mišića (na primjer, u hrvanju ruku).
Uočene su zanimljive činjenice o odnosu između pozitivnog i negativnog mišićnog rada: negativni rad mišića je ekonomičniji od pozitivnog rada mišića; prethodno izvršenje negativnog rada povećava veličinu i efikasnost pozitivnog rada koji ga prati.
Što je veća brzina kretanja ljudskog tijela (za vrijeme atletskog trčanja, klizanja, skijanja itd.), veći dio posla se troši ne na koristan rezultat - kretanje tijela u prostoru, već na pomicanje karika. u odnosu na GCM. Stoga se pri velikim brzinama glavni rad troši na ubrzavanje i kočenje dijelova tijela, jer kako se brzina povećava, ubrzanje kretanja dijelova tijela naglo raste.